


Введение в материал PEEKДатчики роботов
ПЭЭК (полиэфирэфиркетон) — это высокопроизводительный специализированный инженерный пластик, обладающий такими свойствами, как высокая термостойкость (длительная эксплуатационная температура около 240 °C), стойкость к химической коррозии, высокая прочность, лёгкость, низкий коэффициент трения и отличная электроизоляция. Эти преимущества делают его идеальным материалом для ключевых компонентов датчиков роботов, устраняя недостатки традиционных металлических или обычных пластиковых датчиков с точки зрения точности, стабильности и адаптации к окружающей среде.
I. Основные типы и характеристики приложений
Материал ПЭЭК в основном используется для изготовления основных структурных компонентов или функциональных подложек датчиков. Наиболее распространённые области применения:
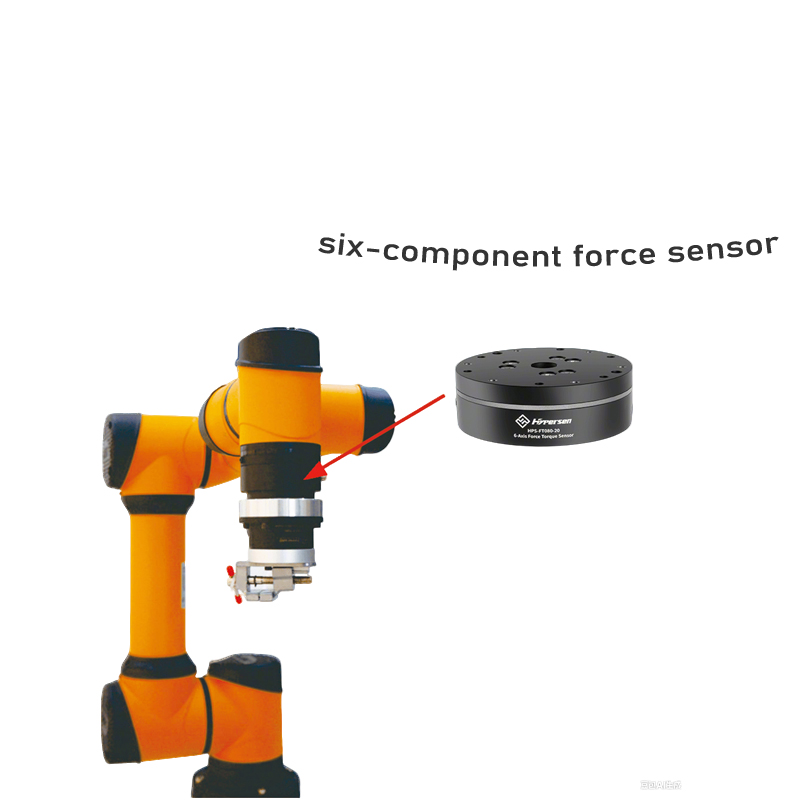
1. Шестимерные датчики силы/крутящего момента
Часть применения: упругое тело (основной компонент для восприятия сигнала силы) датчика.
Основная ценность: Традиционные эластичные тела в основном изготавливаются из алюминиевого сплава, в то время как PEEK имеет лучшее соотношение модуля упругости к плотности, что обеспечивает структурную прочность при значительном снижении массы эластичного тела, минимизирует инерционные помехи во время движения робота и повышает точность измерения силы (до ±0,1% полной шкалы) и скорость динамического реагирования (время отклика < 1 мс).
Типичные сценарии: сборка промышленных роботов (например, точный контроль силы затяжки винтов), совместная работа человеко-машинного робота (например, восприятие силы столкновения), хирургическая обратная связь по усилию медицинского робота (например, контроль силы шлифования поверхности кости в ортопедических роботах).

2. Тактильные/тензодатчики
Применяемая часть: гибкая подложка или носитель электрода датчика.
Основная ценность: ПЭЭК обладает определенной гибкостью и усталостной прочностью, что позволяет перерабатывать его в тонкие или нестандартные формы, подходящие для изогнутых или гибких контактных сценариев, таких как пальцы и захваты робота. В то же время его электроизоляция может предотвратить помехи сигнала, обеспечивая стабильность тактильных данных (например, давления, распознавания текстуры) или данных о деформации (например, деформации сустава).
Типичные сценарии: восприятие давления в сервисных роботах при захвате хрупких предметов (например, стекла, фруктов), контроль деформации для обеспечения гибкости сборки промышленного робота.
3. Специализированные датчики для агрессивных сред
Часть применения: корпус, защитная гильза зонда или контактные компоненты датчика.
Основная ценность: PEEK обладает чрезвычайно высокой устойчивостью к кислотам, щелочам, органическим растворителям и высокотемпературному пару (например, при CIP-очистке в пищевой промышленности), значительно превосходя нержавеющую сталь или обычные пластмассы, защищая внутренние компоненты датчика от коррозии и продлевая срок его службы.
Типичные сценарии: датчики уровня/концентрации жидкости в пищевых/медицинских роботах (например, контроль уровня жидкости в емкостях для соусов), датчики параметров окружающей среды в химических роботах (например, защита датчиков обнаружения едких газов).
II. Основные преимущества перед традиционными материалами

III. Типичные области применения
Промышленные роботы: контроль усилия сборки, обратная связь по усилию шлифования, контроль давления захвата;
Медицинские роботы: восприятие силы хирургических инструментов (например, обратная связь по силе при лапароскопических операциях), мониторинг деформации суставов реабилитационных роботов;
Специальные роботы: коррозионно-стойкие датчики окружающей среды в пищевой/химической промышленности, датчики температуры/силы в условиях высоких температур (например, при сварке автомобилей).









